Una funcionalidad que echaba en falta es el control manual: poder controlar el robot para mandarlo de un lado a otro con el teléfono, en lugar de tener que cogerlo físicamente.
El problema es que, tras analizar el protocolo de control manual a partir de las capturas que había hecho, me encontré con que era ligeramente diferente del que ya estaba utilizando. Para empezar, los comandos no iban a través del servidor, sino que se enviaban directamente desde el móvil a la aspiradora (por fin tenía sentido el puerto 8888). Por otro lado, los «valores misteriosos» no seguían el mismo patrón. Para empezar, es la tablet quien envía los PINGs, y siempre con el mismo número de secuencia: 1a 27 00 00. Por otro lado, estas son varias cabeceras de comandos enviados desde la tablet a la aspiradora:
d1 00 00 00 | fa 00 c8 00 | 00 00 29 27 | 28 27 00 00 | 00 00 00 00 d1 00 00 00 | fa 00 c8 00 | 00 00 2c 27 | 2b 27 00 00 | 00 00 00 00 d1 00 00 00 | fa 00 c8 00 | 00 00 2f 27 | 2e 27 00 00 | 00 00 00 00 d1 00 00 00 | fa 00 c8 00 | 00 00 32 27 | 31 27 00 00 | 00 00 00 00 db 00 00 00 | fa 00 c8 00 | 00 00 35 27 | 34 27 00 00 | 00 00 00 00
Vemos que el primer campo sigue siendo el tamaño, el cuarto sigue siendo un número de secuencia, y el segundo y el cuarto tienen los mismos valores que en el protocolo con el servidor; pero el tercer campo es diferente; de hecho es el valor del número de secuencia pero con los bytes invertidos y sumándole uno al tercer byte.
Esto ya plantea algunas dudas; por ejemplo ¿qué pasa si el número de secuencia es mayor de 0xFFFF? ¿Está prohibido tal vez? Si está permitido ¿el campo tercero será el cuarto más 256 y con los bytes en orden inverso? De hecho ¿realmente el número de secuencia es de cuatro bytes también en el protocolo original, o puede que sean sólo dos bytes?
De hecho, para probar esto último decidí ver hasta qué valor devolvía la aspiradora, y tras varias pruebas me encontré con que 10.000 es el número de secuencia más grande que envía en el protocolo original, tras el cual vuelve al 1. Pero el servidor sí envía números más grandes de 10.000.
Aparte de este problema, está la cuestión de que en el código tendría que añadir un nuevo socket y gestionarlo… no es difícil, pero sí un rollo. Sin embargo… ¿Qué pasaría si se pudiese controlar desde la conexión original? ¿Puede el servidor enviar comandos de control manual?
La pregunta es legítima, pues cabe suponer que el control manual utiliza la conexión directa para reducir la latencia (a fin de cuentas, es un control interactivo), y además, si estamos en el bar no tiene sentido querer controlar manualmente una aspiradora que no podemos ver. Pero aún así hay casos en los que puede ser necesario, por ejemplo que tengamos varias WiFis en nuestra casa y que el teléfono esté conectada a una y la aspiradora a otra. Así que decidí probar justo eso y… ¡¡¡Funcionó!!! ¡¡¡Es posible enviar comandos de control manual a través del socket del servidor!!! Eso simplifica la tarea enormemente.
Ahora toca analizar el formato. Veamos un primer caso: ordenamos al aspirador ponerse a girar alrededor de sí mismo hacia la derecha durante tres segundos (las respuestas de la aspiradora son, simplemente, el estado actual, así que he borrado casi todo el contenido y lo he reemplazado por unos puntos suspensivos para no alargar demasiado el bloque):
1315.019054889679
s->a e1 00 00 00 | fa 00 c8 00 | 00 00 f2 01 | 2d 27 00 00 | 00 00 00 00
{
"cmd":0,
"control":{
"authCode":"xxxxxx",
"deviceIp":"192.168.3.56",
"devicePort":"8888",
"targetId":"yyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyy",
"targetType":"3"
},
"seq":0,
"value":{
"direction":"4",
"transitCmd":"108"
}
}\n
1315.3824479579926
a->s f6 01 00 00 | fa 00 00 00 | 01 00 00 00 | 2d 27 00 00 | 00 00 00 00
[...]
1317.020054889679
s->a e1 00 00 00 | fa 00 c8 00 | 00 00 f2 03 | 2d 27 00 00 | 00 00 00 00
{
"cmd":0,
"control":{
"authCode":"xxxxxx",
"deviceIp":"192.168.3.56",
"devicePort":"8888",
"targetId":"yyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyy",
"targetType":"3"
},
"seq":0,
"value":{
"direction":"4",
"transitCmd":"108"
}
}\n
1317.3924479579926
a->s f6 01 00 00 | fa 00 00 00 | 01 00 00 00 | 2d 27 00 00 | 00 00 00 00
[...]
1318.9394080638885
s->a eb 00 00 00 | fa 00 c8 00 | 00 00 f2 01 | 2f 27 00 00 | 00 00 00 00
{
"cmd":0,
"control":{
"authCode":"xxxxxx",
"deviceIp":"192.168.3.56",
"devicePort":"8888",
"targetId":"yyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyy",
"targetType":"3"
},
"seq":0,
"value":{
"direction":"5",
"tag":"4",
"transitCmd":"108"
}
}\n
1319.4073688983917
a->s f6 01 00 00 | fa 00 00 00 | 01 00 00 00 | 2f 27 00 00 | 00 00 00 00
[...]
Y ya vemos cómo va: el comando es el 108 , y luego hay un campo direction que vale 4. ¿Será el comando 108 para girar a la derecha, y habrá otros para el resto de direcciones, o será un único comando para todo y el campo direction indica cual de los cuatro posibles movimientos se desea? Además, al cabo de dos segundos vemos que se vuelve a repetir el comando. ¿Por qué?
Finalmente, al cabo de tres segundos se emite el comando con la dirección 5, por lo que cabe suponer que eso significa detente. ¿Pero qué significa el campo tag?
Para resolver todas estas preguntas, veamos todos los comandos emitidos para los cuatro movimientos posibles (adelante, atrás, izquierda y derecha):
adelante:
"value":{
"direction":"1",
"transitCmd":"108"
}
"value":{
"direction":"5",
"tag": "1",
"transitCmd":"108"
}
------------------------
atrás:
"value":{
"direction":"2",
"transitCmd":"108"
}
"value":{
"direction":"5",
"tag": "2",
"transitCmd":"108"
}
------------------------
izquierda:
"value":{
"direction":"3",
"transitCmd":"108"
}
"value":{
"direction":"5",
"tag": "3",
"transitCmd":"108"
}
------------------------
derecha:
"value":{
"direction":"4",
"transitCmd":"108"
}
"value":{
"direction":"5",
"tag": "4",
"transitCmd":"108"
}
¡Ajá! Ahora tiene sentido: se utiliza un único comando, el 108, para los movimientos manuales, con 1, 2, 3 y 4 para moverse adelante, atrás, izquierda y derecha respectivamente. Cuando se quiere parar se emite el mismo comando pero con la dirección 5, y el campo tag especifica qué movimiento es el que se cancela (probablemente por si los comandos llegan fuera de orden).
Además, si probamos con movimientos que duren más tiempo se ve que el servidor vuelve a enviar el comando de movimiento cada dos segundos. Todo apunta a que es una manera de asegurar que el servidor «sigue ahí», y que si pasa mucho tiempo sin recibir un comando de refresco, la aspiradora dejará de ejecutar el último comando. Esto tiene sentido: si se pierde la conexión es importante que el robot no se quede ejecutando una orden de movimiento manual…
Y con esto ya tenemos todo lo necesario para implementar el control manual, y así de bonito se ve en la app:
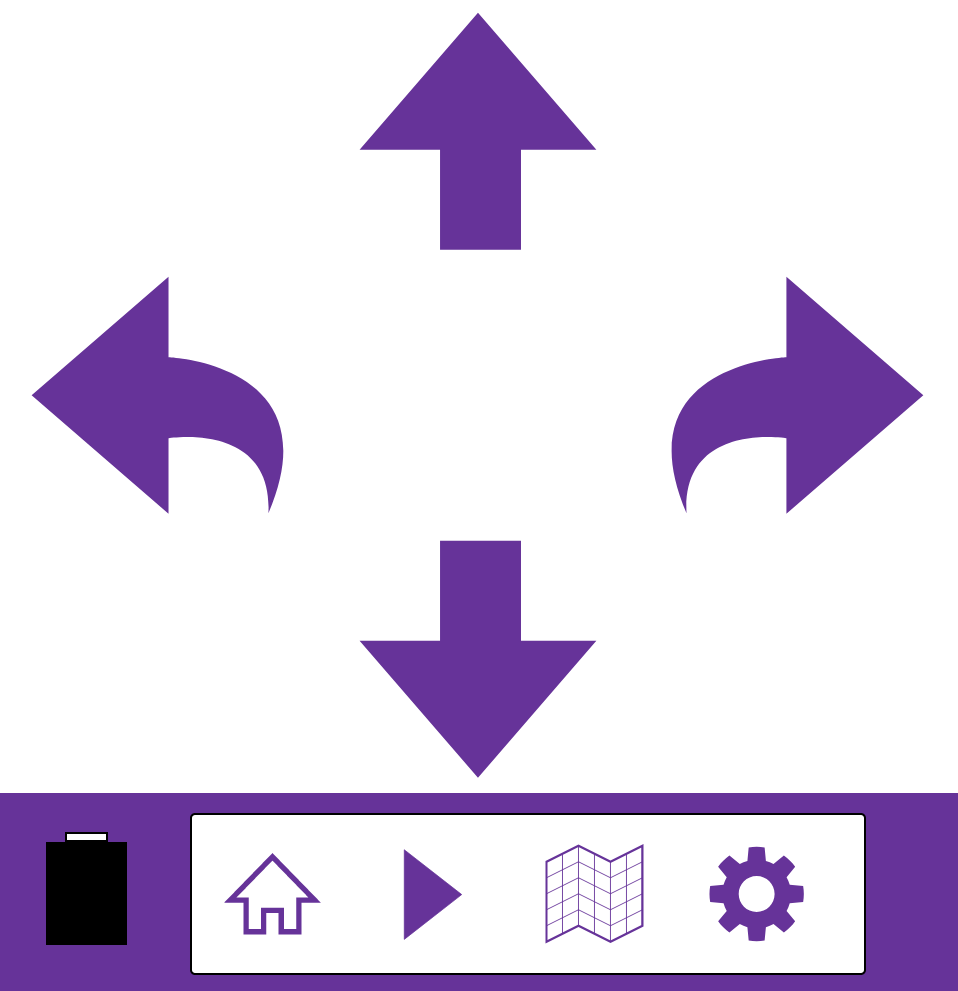
Como se ve, hay un nuevo icono que permite alternar entre modo mapa y modo control manual, y pulsando las flechas el robot se moverá. Eso sí, por desgracia la aspiradora no puede estar en la base para que este modo funcione, parece una limitación del propio firmware del robot, no de la app original.
![]() A ritmo de conga (13) por A cuadros está licenciado bajo una Licencia Creative Commons Atribución-CompartirIgual 4.0 Internacional.
A ritmo de conga (13) por A cuadros está licenciado bajo una Licencia Creative Commons Atribución-CompartirIgual 4.0 Internacional.