Una nueva entrada para comentar que PCBWay ha tenido la gentileza de patrocinar este proyecto, con lo que podré actualizar mis actuales teclados a la versión 1.13 de la placa, con sus tres NeoPixels y demás.
Recientemente estuve haciendo algunos cambios extra en el diseño. Por ejemplo, combiné en ambos diseños la tecla SHIFT corta + tecla de «menor y mayor» de las distribuciones ISO, junto con la tecla SHIFT larga de las distribuciones ANSI. Esto permite combinar distribuciones, algo que puede ser interesante para aquellos que prefieran la tecla de RETURN americana, pero quieran usar una distribución española, por ejemplo.
También aproveché para añadir dos NeoPixeles más en los dos huecos que había entre F4 y F5, y F8 y F9, lo que permite aumentar las posibilidades.
Por supuesto, llegó también el momento de diseñar la carcasa, para lo que decidí aprovechar los resultados de un cursillo de diseño e impresión 3D que hice hace tiempo (¡¡¡¡Gracias por convencerme para ir, Miguel!!!!). No tendría que ser demasiado difícil…
El primer problema que me encontré fue que el teclado mide 32cm de ancho, pero las impresoras 3D normales tienen una cama de entre 20 y 30cm, lo que significa que no podía imprimirlo todo de una sola vez sino que tendría que dividir la carcasa en dos mitades que se pudiesen pegar. Ante esto comencé con el primer diseño:
Como base no estaba mal, pero faltaban las patas y cubrir los huecos entre las teclas. Para ello se me ocurrió que podía utilizar una pieza que se añadiese por detrás.
Menos mal que se me ocurrió probar a imprimirla antes… ¡Menudo desastre! Se suponía que la parte delantera, que es la que queda hacia el fondo en la imagen, tenía unos huecos en donde la placa se introducía para quedar fijada; por desgracia, para imprimirlos hacía falta utilizar soportes, los cuales no había manera de quitar en una zona tan estrecha como una placa de circuito impreso. Ante esto, decidí probar un segundo diseño:
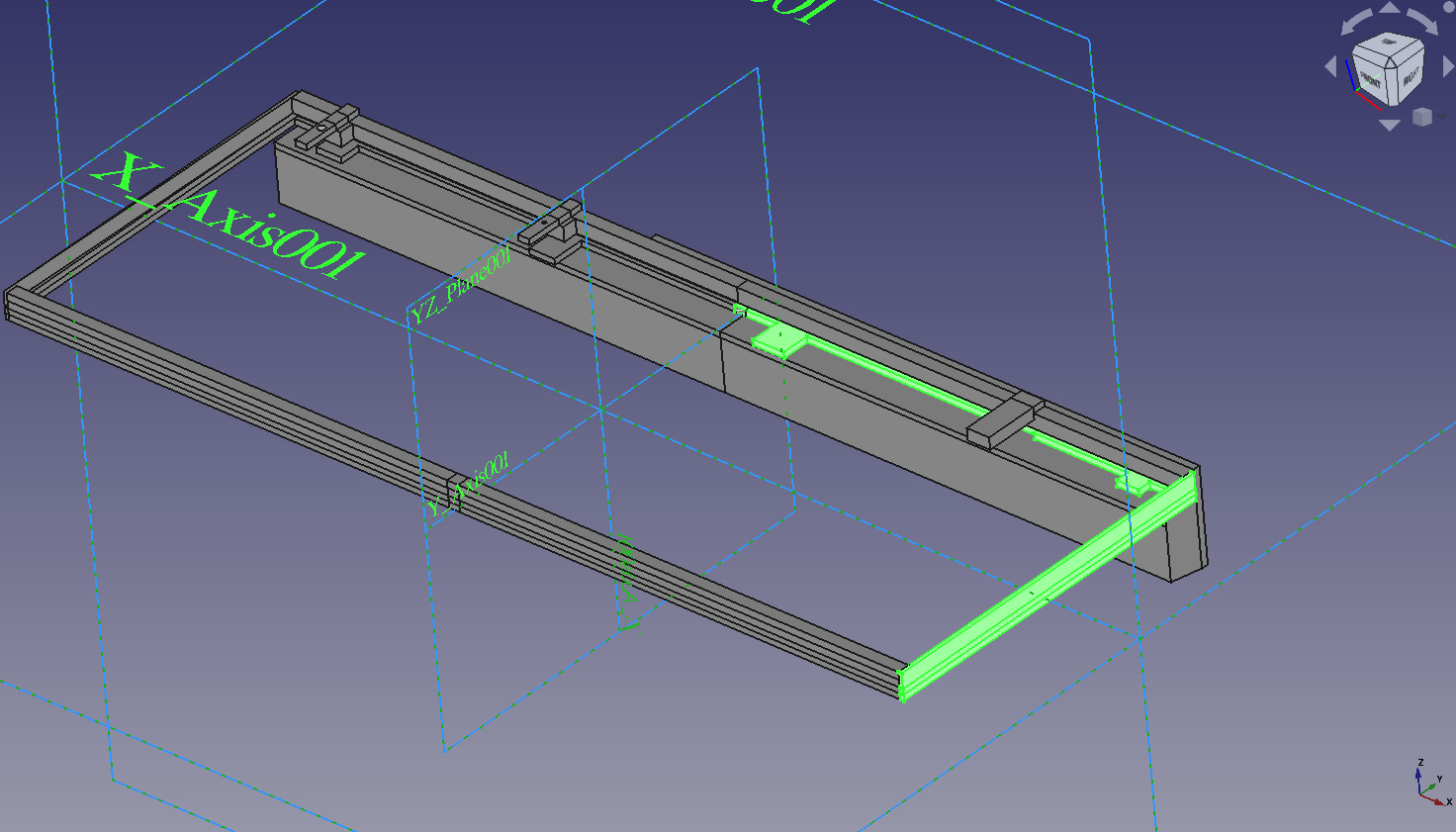
En este nuevo diseño, el bloque principal de la carcasa estaba compuesto por cuatro piezas en lugar de dos (a mayores hay dos piezas extra para hacer una pata que va de un extremo a otro). Las dos piezas traseras se imprimirían «planas», pero las delanteras, en donde estaba la ranura en donde encajaría la PCB, se imprimiría «hacia arriba», con el frontal apoyado en la cama. De esta manera se podían evitar los soportes.
Por desgracia, aún era demasiado complicado, pues la parte de la pata consumía muchísimo filamento y no era nada sencilla de montar. Además, la alineación de las cubiertas para las zonas entre las teclas era crítica, pues hay menos de un milímetro de margen: un error, por pequeño que sea, haría que las teclas rozasen o, peor aún, no pudiesen bajar… como de hecho me ocurrió.
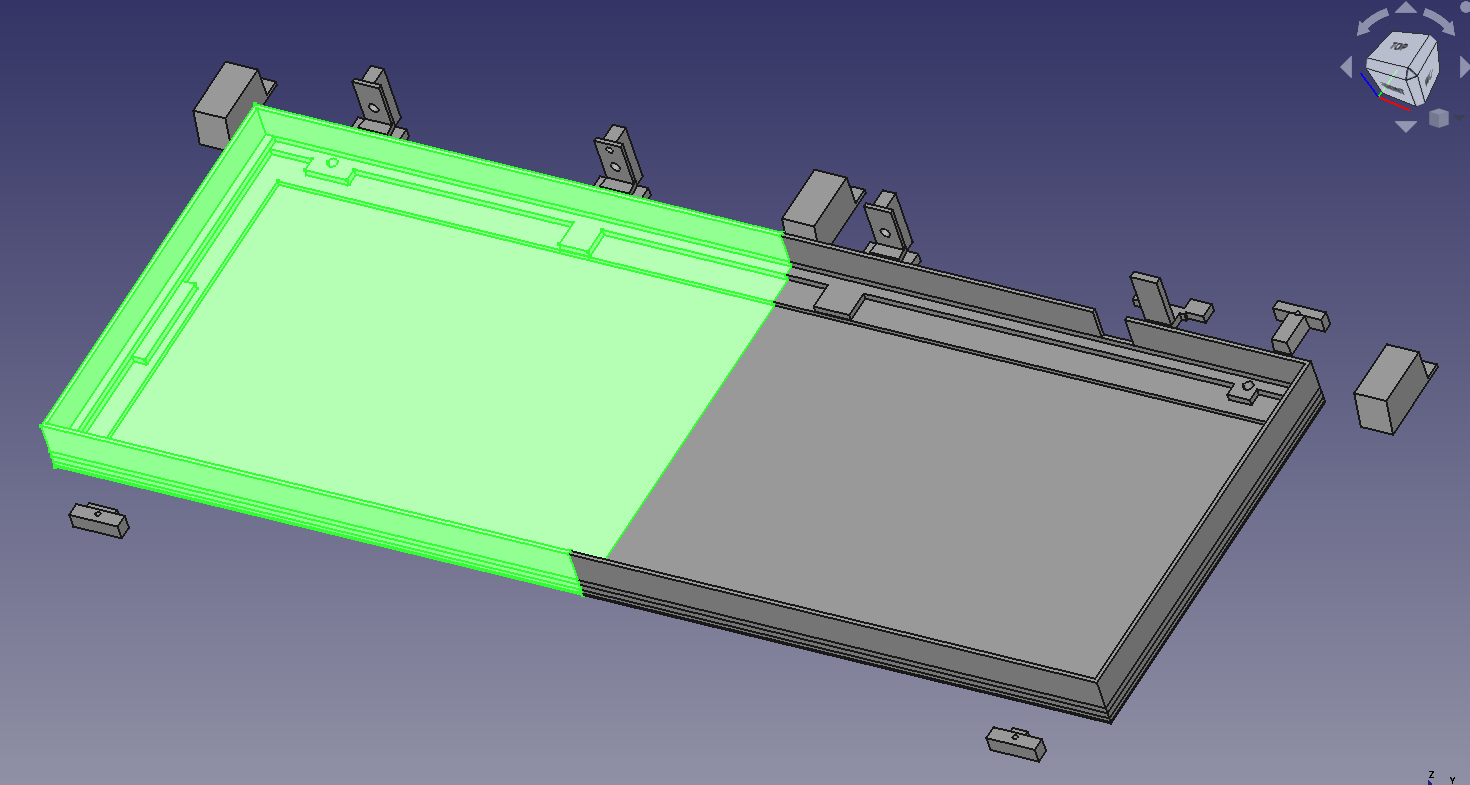
Finalmente, tras darle muchas vueltas se me ocurrió que podía simplificarlo muchísimo si separaba las cubiertas de los huecos de la carcasa, de manera que fuesen piezas independientes. De aquí salió el diseño de arriba: las dos piezas traseras se imprimen rotadas 90 grados, mientras que las dos piezas delanteras se imprimen «tal cual», de manera que no hace falta ningún tipo de soporte. El diseño lo hice sin la base para ahorrar plástico, pues quería usar un trozo de lámina de polietileno recortada para abaratar costes y reducir el tiempo de impresión.
Las piezas para cubrir los huecos entre las teclas de función las imprimí aparte, con la intención de pegarlas directamente en la PCB. Esto no sólo simplificaba mucho el diseño, pues no había que hacer malabares para evitar tener que usar soportes, sino que, además, eliminaba completamente los problemas de falta de precisión:
El diseño tenía buena pinta, pero aún no me acababa de convencer, pues había que pegar cuatro piezas para construir la carcasa, lo que no era muy cómodo. Además, la idea de ahorrar costes utilizando una lámina de polietileno como base no resultó: para empezar, las ranuras que había en el diseño para que ésta encajase eran demasiado estrechas, algo que, además, dependería de la impresora en sí. Pero además, si quería que las piezas se imprimiesen bien, no me quedaba más remedio que imprimir una «balsa», con lo que el ahorro no era tal, pues al final estaba imprimiendo la base igual, sólo que la tiraba a la basura.
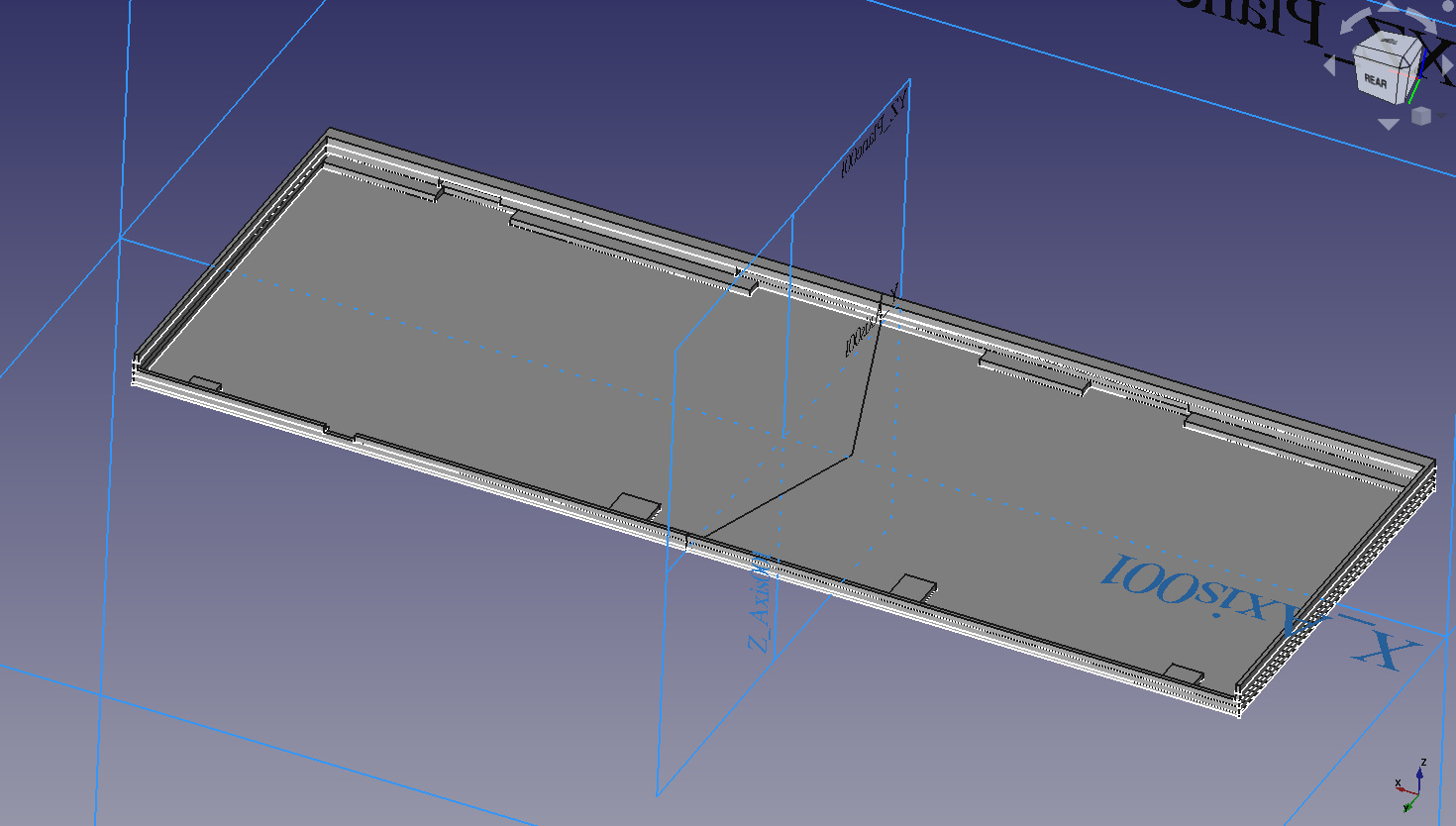
Finalmente, llegué al diseño actual, que es éste:
La carcasa en sí está compuesta por solo dos piezas, las cuales, además, son muy fáciles de pegar. La superficie principal de la base tiene un grosor de sólo 0,6 milímetros, lo que significa que se gasta la misma cantidad de filamento que si se utilizase una «balsa» con el diseño anterior; sin embargo, la resistencia es la misma, pues en los bordes el grosor aumenta para darle rigidez. Las patas se imprimen aparte y se pegan en el borde trasero. Esto tiene la ventaja de que es posible imprimir patas de distinta altura para ajustarlo a las preferencias de cada uno. Por último, las cubiertas se imprimen aparte, como se ve, y además hay tres piezas extra que también se pegan entre las teclas y que sirven como «tuercas» para atornillar la placa a la carcasa (aunque en los dos teclados que hice no fue necesario, pues quedaron perfectamente ajustadas).
En la entrada anterior expliqué cómo construí un pedal para tomar fotografías desde el móvil y así simplificar el documentar proyectos hardware. Por desgracia, cuando llegó el momento de usarlo por primera vez me encontré con un problema: resulta que la aplicación de cámara de Android se cierra automáticamente al cabo de dos minutos de no hacer nada con ella. Esto es un problema porque entre foto y foto bien puede pasar mucho más tiempo, lo que me obligaría a acercarme al móvil y lanzar la aplicación de nuevo. Esto no tiene nada que ver con el apagado automático de la pantalla: aunque le ponga media hora para que apague la pantalla, la aplicación de la cámara vuelve a la pantalla principal a los dos minutos de estar «sin hacer nada».
Obviamente esto es completamente inaceptable, así que decidí agarrar el toro por los cuernos y escribir una pequeña aplicación de cámara para Android que no tuviese este problema. Para ello partí de un ejemplo de cómo utilizar la cámara en Android, escrito en Kotlin. Reconozco que no es un mal lenguaje, pero no le acabo de pillar el punto (todo lo contrario que Go… pero esa es otra historia).
Tras una primera prueba, conseguí que funcionase de manera constante. Sin embargo, me encontré con la desagradable sorpresa de que el tener la cámara funcionando constantemente hace que el móvil se caliente un montón, cosa que no me hacía nada de gracia (de hecho, al buscar por qué la aplicación oficial de cámara se cerraba a los dos minutos, uno de los motivos que decía era ese; me parecía muy extraño, teniendo en cuenta que sí puedes grabar vídeo durante más tiempo, pero visto lo visto, podría ser una de las razones).
Ante esto, tuve que complicar un poco la aplicación, haciendo que la cámara se desactive al cabo de un tiempo sin hacer nada, pero dejando la aplicación en primer plano y activando de nuevo la cámara tan pronto se pulsa uno de los botones de volumen para tomar una foto. De esta manera el móvil no se recalienta.
Como comienzo no estuvo mal, pero claramente tenía un problema: ¿cómo puedo saber si una foto es buena, o tengo que repetirla? La solución fue relativamente sencilla: añadir la posibilidad de enviar cada foto tomada a mi portátil, que estaría en un sitio donde podría ver fácilmente el resultado. Así, añadí dos campos de texto en la app en los que teclear la dirección IP del portátil y un puerto (por defecto usa el 9000), y en éste correr una pequeña aplicación en python que se limite a escuchar por dicho puerto, y cuando se abra, recibir los datos de la imagen en formato JPEG, descomprimirlos, y mostrarlos en la pantalla.
El resultado era bastante bueno, pero tenía un problema aún: la cámara de mi móvil es de 4160×3120 pixels, un tamaño exageradamente grande que resulta en ficheros muy grandes. El resultado es que entre que pulso el pedal y aparece la foto en el portátil pasan unos nueve segundos (tres de los cuales son debidos a tener que encender la cámara). Para resolverlo añadí un campo de «resolución», que permite poner un tamaño deseado (yo le pongo 2048), de manera que el móvil escogerá la resolución más cercana a ese valor entre los que permita la cámara. Con esto, el tiempo baja a cuatro segundos si la cámara estaba apagada, y un segundo si la cámara estaba encendida (por ejemplo si no nos gusta la foto y decidimos sacar otra, la cámara estará ya encendida y será muchísimo más rápido).
El código fuente (compilable con Android Studio) está disponible en mi repositorio GIT: https://gitlab.com/rastersoft/footcam. Hay un paquete APK para Android ya compilado que se puede descargar desde la sección Tags, simplemente pinchando en el número de versión. En el repositorio principal se puede descargar el programa de visualización remota, llamado «receiver.py«. Para utilizarlo, además de Python3 es necesario WxPython.
Me gusta hacer proyectos de electrónica, pero documentarlos… ¡ay! Eso ya es otro cantar. A fin de cuentas, para ello tengo que decidir cuando sacar alguna foto, y eso me obliga a parar lo que estoy haciendo, sacar el móvil, encuadrar con una mano mientras con la otra sostengo lo que estoy haciendo… un cristo.
Pero a la vez tengo claro que quiero documentarlo, por un lado por mí, porque así tengo un registro de las cosas que he hecho y me puede servir en el futuro («¿Cómo había hecho aquello…?), y también porque puede ser útil para otras personas.
Tras darle varias vueltas, se me ocurrió una idea: dado que tengo un trípode con soporte para el móvil, podría montarlo y encuadrar una zona concreta de la mesa de trabajo, ya con luz adecuada y demás, y cada vez que quiera sacar una foto sólo tendría que pulsar un botón.
Por supuesto, queda la cuestión de cómo conectar ese botón, pero afortunadamente es algo que hace cualquier palo selfie que se precie, por lo que sólo tenía que conectarlo a la entrada de cascos. Rebusqué en internet y encontré las especificaciones oficiales 3.5 mm Headset: Accessory Specification y 3.5 mm Headset Jack: Device Specification. Estas dos especificaciones indican cómo se deben conectar los altavoces, micrófono y pulsadores en un móvil Android, y qué funcionalidad debe tener cada uno.
Una lectura rápida nos indica que los botones están conectados entre el terminal 3 y 4 del jack, en paralelo con el micrófono, y que las cuatro funcionalidades posibles se consiguen presentando un valor concreto de resistencia entre dichos terminales. Así, si aparecen 0 ohmios (o sea, si se cortocircuitan), la función es la A (play/pausa/descolgar si es una pulsación corta; asistente si es una pulsación larga, o siguiente canción si son dos pulsaciones cortas); con un valor de entre 210 y 290 ohmios la función será la B (subir volumen); un valor de entre 360 y 680 ohmios activará la función C (bajar volumen); por último, un valor entre 110 y 180 ohmios activará la función D, que es una funcionalidad «reservada». Dado que la cámara se puede activar con cualquiera de los botones de volumen, bastaba con poner una resistencia adecuada en serie con un pulsador entre los terminales 3 y 4 del jack y estaría listo.
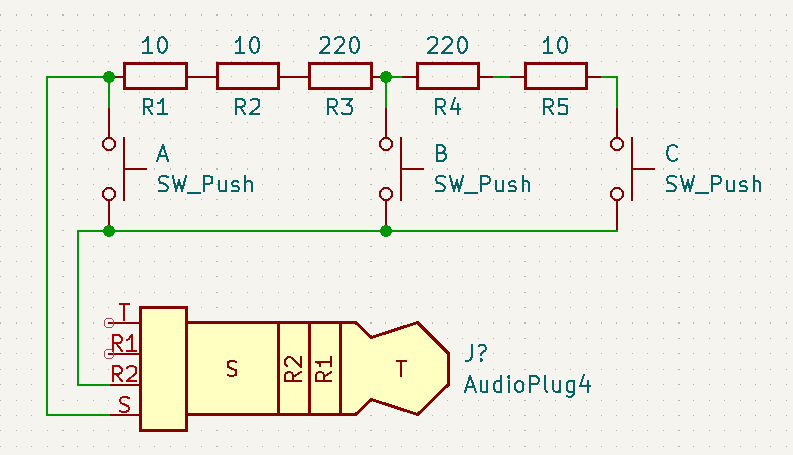
Decidí hacer una prueba rápida con un único botón, y para mi sorpresa… ¡¡¡no funcionó!!! Ante esto, decidí hacer un montaje un poco más completo con las funciones A, B y C:
Con los valores del esquema, el botón A cortocircuita los pines 3 y 4 del jack; el botón B muestra 240 ohmios, y el C 480 ohmios.
Y seguía sin funcionar: el móvil detectaba que había algo conectado, pero no hacía absolutamente nada: ni subir y bajar el volumen, ni responder a una llamada… ¡nada! Revisé los valores de resistencia con el polímetro, probé otros valores para activar otras funciones… pero nada, no quería funcionar. Era rarísimo.
Decidí buscar a gente que hubiese hecho un montaje similar y encontré un par de ejemplos documentados, pero ambos hacían exactamente lo mismo que yo.
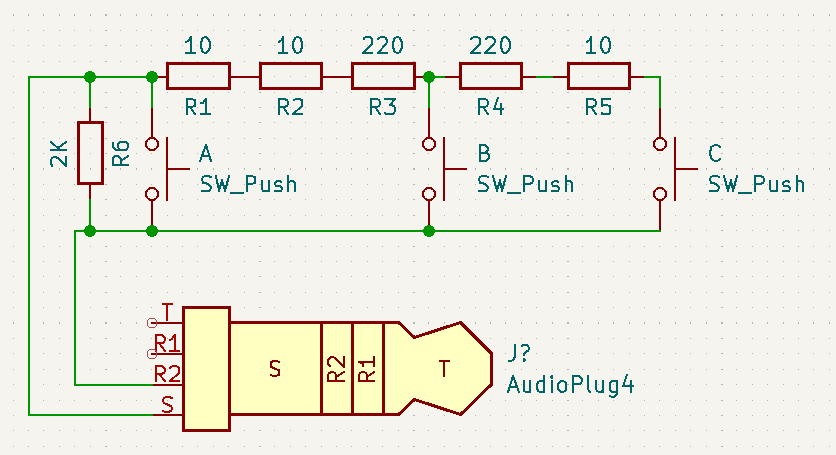
Me releí una y otra vez la documentación, y entonces caí en un detalle: se indica que el micrófono tiene que tener una impedancia en continua superior a 1000 ohmios. Yo había dado por supuesto que podía dejarlo «desconectado», pues infinito es mayor que 1000 ohmios, pero, por si acaso, decidí poner en paralelo una resistencia de 2Kohmios, así:
¡Y ahora sí que funcionó! Está claro que al menos mi móvil espera que haya una cierta impedancia, y no un valor «infinito».
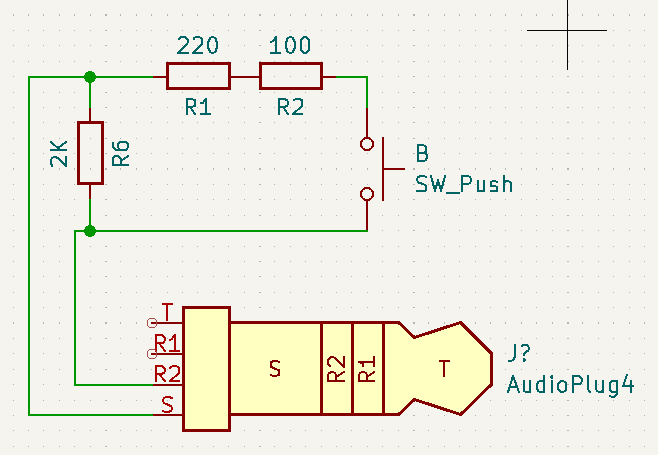
Con esto claro, hice algunos cálculos y el circuito definitivo es éste:
Cuando el pulsador está abierto, el móvil ve una resistencia de 2 Kohmios, y cuando se pulsa, al poner en paralelo un valor de 320 ohmios, el valor que ve es de 1 / (1/2000 + 1/320) = 275,8 ohmios, lo que activa la función B (subir volumen).
Ahora llegó el momento de decidir cómo activar la cámara. Aunque la primera opción sería tener un pulsador en algún lugar cómodo, eso seguiría implicando soltar lo que esté haciendo, así que decidí que tenía que ser algo que pudiese activar sin las manos. Y la opción obvia es un pedal. Aunque podía comprar uno, preferí aprovechar cosas que ya tenía por aquí y montarme uno yo mismo. Para ello utilicé unos pulsadores de circuito impreso que tenía en casa y unas protoboards.
Los cuatro pulsadores están conectados en paralelo, así que basta con que se active cualquiera para que el móvil detecte la función «subir volumen». Obviamente, la placa va al revés de como se ve, con los pulsadores hacia el suelo, y hago presión por el lado de las soldaduras… algo nada recomendable (ni para las soldaduras, ni para el pie si se hace descalzo), así que le pegué una segunda placa por el lado opuesto para taparlo todo.
Y este es el resultado:
Utilizamos cookies para garantizar que tenga la mejor experiencia en nuestro sitio web.